炸机是航拍中国难以预防的事故,不少炸机案例都是老生常谈。南京无人机培训学校的汪教练为大家整理几个相对不算常见的炸机情景,以及给出建议。 一、电机堵转 这在之前算是相对常见的一种炸机情况,不过随着无人机的迭代,现在情况有所好转。一部分没有冗余设计的四轴翼无人机,飞行动力全靠电机提供,且缺一不可。如其中一轴的马达失灵堵转,对飞行表现会有极大的影响,导致坠落炸机。 
对策: 启动旋翼马达后,不用急于起飞,宜先听听有否杂声,确认无误才升空; 起飞后,亦应悬停一阵子,看看飞行状态有否出现异常的倾侧。如真的发现无人机有问题,应立即减速,并缓缓降落。 当飞行完毕后,大家应简单清理马达上的灰尘、杂草; 避免在有金属铁屑的环境飞行。 二、指南针出现错误 无人机飞行时如指南针发生错误,这将是非常危险的事情:上一秒还在正常飞行,下一秒就会乱飞乱转。又或者,飞友会在飞行时发现无人机难以平稳悬停,总是偏侧向一边,甚至想停也停不下来;更严重的,飞行器会莫名其妙地打转。 
对策: 每趟飞行前先为指南针作校正; 另外也要留意飞行时有否遇上大型干扰物; 一旦不幸遇上此问题,应尽量疏散无人机下方的人,并时刻留意能否取回控制。 三、返航时撞上障碍物 具备感知避障功能的无人机在执行自动返航时会更安全一些。最常遇到的情况是,无人机作直线返航,结果撞上返航轨道上的障碍物。 对策: 启动自动返航前宜先飞升至安全高度(比现场附近的楼宇或山丘更高的高度)。 自动返航进行期间,应监察着图传画面上,留意返航轨道上有否障碍物; 一旦有障碍物出现,就应立即中止返航功能,改为手动操作。 放飞前,应先留意一下返航飞行高度等相关设定。 四、返航点设定错误 比起自动返航遇到障碍物还要危险的情况,应该是返航点设定错误。假如航拍无人机在起飞后才完成返航点设定,飞手便会错误估计返航点的位置。 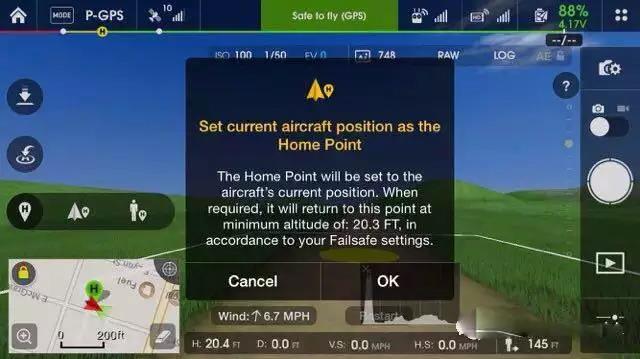
对策: 起飞前,确保GPS信号接收正常; 起飞前确定返航点; 留意飞手是否已离开先前的起飞位置。 五、错认他人无人机 把别人的航拍无人机错认作自己的,这有可能吗?当阁下发现放飞现场附近的飞友,大都是使用相同品牌或型号的空拍机,错认也非不可能之事。错认他人空拍机所衍生的问题,是误以为自己的无人机失灵,因而胡乱操作,引致飞机失控。 
对策: 可在轴臂贴上贴纸以作识别; 无法辨别时,要仔细查看图传画面,以判断飞行方向和位置; 开启自动返航功能。 六、忽略机头方向 无人机的航拍镜头预设为第一人称视点,飞行器飞行的方向跟遥控操作相符。惟近年流行用无人机进行自拍,这时候机首会朝向飞友,连带操作方向也会左右前后互掉,一不留神便会误把无人机飞向人群,易生危险。 
对策: 如遇这种情况,应让无人机立即飞升以争取多点时间作调整。 慎用提供无头模式,理论上无头模式可不理会机首方向来操作,但因操作方式不断改动反而令人难以适应,容易产生意外。
|


